Узнай об автоматике все - читай kip-help.narod.ru
Хочешь узнать ответ
на свой вопрос?
Напиши в редакцию!
|
|
Узнай об автоматике все - читай kip-help.narod.ru |
Хочешь узнать ответ на свой вопрос? Напиши в редакцию! |
| Пропорционально-интегрально-дифференциальный регулятор | Письмо в редакцию |
|
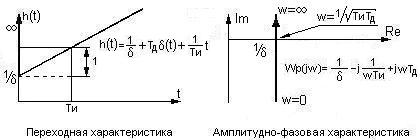
(ПИД-регулятор) ПИД-регулятор - это параллельно соединенные П-, И- и Д- звенья. Выходной сигнал ПИД-регулятора ( u(t) ) зависит от ошибки регулирования ( e(t) ), от интеграла от этой ошибки и от производной от этой ошибки. K1 - коэффициент усиления пропорциональной части, K0 - коэффициент усиления интегральной части К2 - коэффициент усиления дифференциальной части Передаточная функция ПИД-регулятора: Wр(S)=K1+K0/S+K2*S Переходная характеристика: h(t)=K1+K0*t+K2*d(t), где d(t) - дельта-функция, t³0 Усилительные свойства ПИД-регулятора характеризуют три параметра: 1) предел пропорциональности d=1/K1 - величина, обратная K1 (см. П-регулятор) 2) время изодрома Ти=1/K0 - величина, обратная K0 (см. И-регулятор) 3) постоянная времени дифференцирования (время предварения) Тд=K2 (см. ПД-регулятор) Динамические характеристики ПИД-регулятора
Системы регулирования с ПИД-регуляторами сочетают в себе достоинства П-, И-, и ПД- регуляторов. В таких системах отсутствует статическая ошибка и они обладают высоким быстродействием. |
||
|
Научись самостоятельно изготавливать электронные устройства с сайтом radiohlam.ru
|
||
|
Решим для вас задачи по математике, физике, тау, программированию... |
||
|
|
© 2007 Материалы сайта охраняются законом об авторском праве |